Interpretable, (near) optimal, safe, and resource-efficient way of modeling and control.
PI: Dr. Mohamed Ismail
Co-I: Dr. Ayman Abdallah
Consultant: Prof. Quan Quan
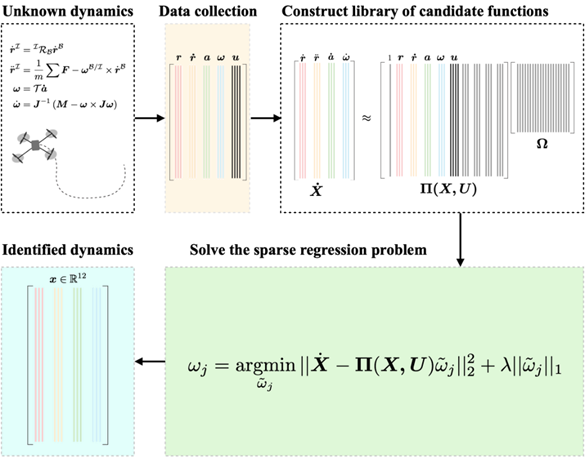
Textbook derivations still rely on first principles, the project inverts that workflow.
Flight data/simulations are passed to Sparse Identification of Non-linear Dynamics framework and extracts closed-form quadrotor equations straight from flight data, deleting many candidate terms until only the governing physics remain.
A variant of this method is that where we augment Control-Barrier Functions to wrap those equations with state-dependent safety margins, certifying safety and ensuring obstacle avoidance.
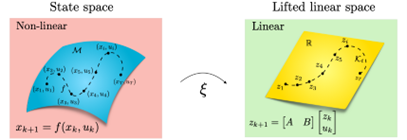
Next, we use Koopman theory to lift the nonlinear system onto a higher-dimensional linear space. Here, we have laid the first steps of designing LQR controller to ensure eigenvalues are stable and tested the identified global linear model on precomputed PD control.
In resource constrained networks continuous feedback wastes energy. Data-driven event-triggering cuts network headache by a Greate deal across different examples with Lyapunov-guaranteed convergence.
From sparse symbolic laws to barrier-protected trajectories and network-thrifty updates, the project re-writes quadrotor autonomy around data itself; physics discovered, safety certified, resources respected.